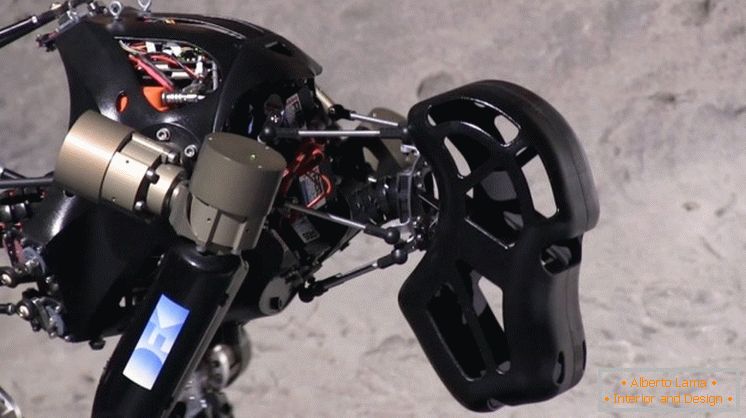
Немачки истраживачки центар за вештачку интелигенцију (ДФКИ) и Универзитет у Бремену раде на симиан роботу иСтруцт Демонстратор, класификован је као "свемирски робот". Сада механички мајмуни пролазе тестове за ходање и равнотежу у условима у близини рељефа мјесеца.

Истраживање опасних лунарних површина захтијева кориштење различитих облика кретања, а истраживачи из ДФКИ проучавају своје способности (укључујући комбинацију ногу, точкова и гусеница). Мајмунски роботи имају одређене предности у поређењу са точковима, подршка са четири тачке омогућава вам да креирате стабилнију позицију приликом пењања кроз препреке или брдски терен. Робот се може балансирати на задњим ногама како би ослободио предње крајеве како би извршио било коју акцију.

Са новим међународним интересима у лунарној мисији, постоји могућност да иСтруцт (или један од његових потомака) буде у могућности посјетити мјесец. Колонизација Месеца од стране робота почиње развојем који може да се развије и разумно реагује у било којој тренутној ситуацији. У том смислу циљ пројекта је изградња "напредне вештачке интелигенције" и роботског система који може да учи и крене наоколо.
Робот има кичму која повезује кавез и карлицу, што му даје већу флексибилност, као и сензор оптерећења стопала и зглоба који реагују када су у контакту са земљом.
Остале карактеристике укључују:
- 43 независних мотора;
- Шест додатних ФСР сензора на отвореним деловима за откривање препрека;
- 6-осни сензор момента;
- Дигитални 3-осни акцелерометар, да перципирају оријентацију стопала у свемир;
- Два температурна сензора за компензацију промена температуре у електроници;
- Дигитални магнетни сензор за угаонску контролу сваке покретне осе стопала и зглобног зглоба;
Већина робота већ садржи многе од ових сензора, али артикулисана кичма иСтруцт (која може да функционише као претварач обртног момента од 6 оса) је врста реткости за локомоторне роботе који помажу у кретању на сва четири. Сензори у ножним и зглобним зглобовима омогућавају му да одржи равнотежу на нагнутој површини.
У 2008. и 2009. години, дипломирани инжењер Даниел Кухн радио је на сличном роботу. Мали мајмун који је био способан за једноставно ходање са четири ноге. Након овог пројекта, почео је радити на иСтруцт-у, који има значајне допуне. Ово је много већа тежина, 18 кг и димензије 66 к 43 к 75 цм, а такође садржи 26 степени слободе, а погони су од стране различитих електричних мотора. Пројекат треба да буде завршен у августу ове године.
Можете видети како он користи своје интелектуалне ноге и зглобове приликом ходања и одржавања равнотеже у видео запису испод. Ово је мали корак за робот мајмуна, али потенцијално огроман скок за све роботике сличног дизајна.
Валкинг
Балансирање
Фотогалерија Укупно | 14 слика